 Eines der ikonischen Bildmotive der US Raumfahrt — und weit darüber hinaus — ist das Foto, das den US Astronauten Bruce McCandless einsam frei schwebend über unserem blauen Planeten zeigt. An diesem 07.02.1984 ging nicht nur der Traum vieler Wissenschaftler und Ingenieure in Erfüllung. McCandless realisierte auch etwas, das in zahllosen Science Fiction Stories seit den 1950er Jahren als selbstverständlich dargestellt worden war. Tatsächlich kumulierten mit diesem Ereignis aber jahrzehntelange Arbeiten an einem einsatzfähigen System, das es einem Raumfahrer ermöglichte, sich frei im Weltraum zu bewegen und dabei auch größere Distanzen zwischen zwei Raumfahrzeugen zu überbrücken.
Eines der ikonischen Bildmotive der US Raumfahrt — und weit darüber hinaus — ist das Foto, das den US Astronauten Bruce McCandless einsam frei schwebend über unserem blauen Planeten zeigt. An diesem 07.02.1984 ging nicht nur der Traum vieler Wissenschaftler und Ingenieure in Erfüllung. McCandless realisierte auch etwas, das in zahllosen Science Fiction Stories seit den 1950er Jahren als selbstverständlich dargestellt worden war. Tatsächlich kumulierten mit diesem Ereignis aber jahrzehntelange Arbeiten an einem einsatzfähigen System, das es einem Raumfahrer ermöglichte, sich frei im Weltraum zu bewegen und dabei auch größere Distanzen zwischen zwei Raumfahrzeugen zu überbrücken.Anfangs galt das Interesse (des Militärs) noch vor allem der Entwicklung von „Jump Belts“, „Rocket Belts“, „Jet Packs“ u.a.m., die geeignet waren, unter irdischen Bedingungen Soldaten weite Sprünge oder kurze Flüge über natürliche und künstliche (Minenfelder) Hindernisse zu ermöglichen. Raumfahrt, insbesondere die bemannte, lag da noch immer einige Jahre in der Zukunft. Auch die anfängliche Begeisterung des US Militärs flachte rasch wieder ab. Denn alle vorgestellten Entwürfe bedurften einer umständlichen „Startvorbereitung“, waren extrem laut und hinsichtlich Flugweite, –höhe und –distanz extrem limitiert. 1962, die bemannte Raumfahrt hatte eben erst begonnen, wandte sich die NASA im Rahmen ihrer vielfältigen Studien auch den Fragen zu, die mit dem Ausstieg eines Astronauten in den freien Raum verbunden waren. Mindestens ebenso groß war das Interesse seitens der USAF an solchen Fragen. Denn dort hoffte man noch immer, das Ende der 1950er Jahre begonnene Projekt
 X-20 „Dyna-Soar“ eines kleinen Raumgleiters realisieren zu können. Und bei diesem standen Aufklärungsmissionen bis hin zur Inspektion „feindlicher“ Satelliten im Vordergrund. Vor allem aber bei längeren Raumflügen sahen NASA wie auch USAF den Bedarf für einem solchen „Raketenrucksack“, der z.B. bei Montagearbeiten im Raum nützlich schien. 1962/63 unternahmen Bell Aerospace und Ling-Temco-Vought eine Reihe von Studien zu dieser Thematik. Praktisch realisiert wurde als erstes Design die Self-Maneuvering Unit (SMU). Im Januar 1962 hatte die Chance-Vought Corporation ihre Studie abgeliefert. Und schon im Juni 1962 erhielt die USAF einen Prototypen, der bei zahlreichen Parabelflügen mit einer KC-135 einer umfassenden praktischen Erprobung unterzogen wurde (mehr als 250 Parabeln und insgesamt etwa 50 Minuten Schwerelosigkeit). Das Konzept erwies sich als durchaus vielversprechend. Die auf dem Rücken des Astronauten getragene SMU beeinträchtigte die Bewegungsfähigkeit in vertretbarem Maße und konnte mit einer Hand bedient werden, so daß die zweite Hand frei blieb für die auszuführenden Arbeiten bzw. zur Eigensicherung. Freilich wußte man zu dieser Zeit nur sehr wenig darüber, ob der Mensch im freien Raum überhaupt arbeitsfähig sein würde. Denn die ersten tastenden Schritte außerhalb eines Raumschiffs unternahmen Kosmonauten und Astronauten erst 1965. Die Erfahrungen mit der SMU führten zu einem verbesserten Entwurf namens . Sowohl die Zahl (zwölf statt zehn) Düsen als auch ihre Anordnung wurden verändert. Zudem wurde die Ausrüstung des Astronauten nun um ein vor der Brust zu tragendes System ergänzt. Darin enthalten waren u.a. eine Sauerstoff-Notreserve, Batterien sowie Kommunikations– und Kontrollsysteme. Der Rucksack-Teil war um drei Miniatur-Gyroskope für die Stabilisierung im Raum ergänzt worden. Die primären Kontrollen zur Steuerung waren nun auf zwei ausklappbaren Armen links und rechts des Astronauten untergebracht. Mit der Modularisierung des Systems war es nun möglich, die sperrige Antriebseinheit außerhalb des beengten Gemini Raumschiffs unterzubringen und mit den beschränkten Vorräten des Brustpacks den Weg aus der Luke bis zum Servicemodul des
X-20 „Dyna-Soar“ eines kleinen Raumgleiters realisieren zu können. Und bei diesem standen Aufklärungsmissionen bis hin zur Inspektion „feindlicher“ Satelliten im Vordergrund. Vor allem aber bei längeren Raumflügen sahen NASA wie auch USAF den Bedarf für einem solchen „Raketenrucksack“, der z.B. bei Montagearbeiten im Raum nützlich schien. 1962/63 unternahmen Bell Aerospace und Ling-Temco-Vought eine Reihe von Studien zu dieser Thematik. Praktisch realisiert wurde als erstes Design die Self-Maneuvering Unit (SMU). Im Januar 1962 hatte die Chance-Vought Corporation ihre Studie abgeliefert. Und schon im Juni 1962 erhielt die USAF einen Prototypen, der bei zahlreichen Parabelflügen mit einer KC-135 einer umfassenden praktischen Erprobung unterzogen wurde (mehr als 250 Parabeln und insgesamt etwa 50 Minuten Schwerelosigkeit). Das Konzept erwies sich als durchaus vielversprechend. Die auf dem Rücken des Astronauten getragene SMU beeinträchtigte die Bewegungsfähigkeit in vertretbarem Maße und konnte mit einer Hand bedient werden, so daß die zweite Hand frei blieb für die auszuführenden Arbeiten bzw. zur Eigensicherung. Freilich wußte man zu dieser Zeit nur sehr wenig darüber, ob der Mensch im freien Raum überhaupt arbeitsfähig sein würde. Denn die ersten tastenden Schritte außerhalb eines Raumschiffs unternahmen Kosmonauten und Astronauten erst 1965. Die Erfahrungen mit der SMU führten zu einem verbesserten Entwurf namens . Sowohl die Zahl (zwölf statt zehn) Düsen als auch ihre Anordnung wurden verändert. Zudem wurde die Ausrüstung des Astronauten nun um ein vor der Brust zu tragendes System ergänzt. Darin enthalten waren u.a. eine Sauerstoff-Notreserve, Batterien sowie Kommunikations– und Kontrollsysteme. Der Rucksack-Teil war um drei Miniatur-Gyroskope für die Stabilisierung im Raum ergänzt worden. Die primären Kontrollen zur Steuerung waren nun auf zwei ausklappbaren Armen links und rechts des Astronauten untergebracht. Mit der Modularisierung des Systems war es nun möglich, die sperrige Antriebseinheit außerhalb des beengten Gemini Raumschiffs unterzubringen und mit den beschränkten Vorräten des Brustpacks den Weg aus der Luke bis zum Servicemodul des {kind=link}
 Raumschiffs und zurück zu bewältigen. Die USAF, die nach der Einstellung des „Dyna-Soar“ Programms ihr Interesse einer eigenen Raumstation MOL (Manned Orbiting Laboratory) mit Gemini Versorgungsraumschiff zugewandt hatte, wollte das NASA Gemini Programm u.a. nutzen, die weiter entwickelte Astronaut Maneuvering Unit (AMU) zu erproben. Dagegen ließ die NASA die (HHMU) entwickeln. Wie der Name schon sagte, war letzteres ein eher simples, in der Hand zu haltendes, System. Sein Design brachte ihm auch den Spitznamen „Gun“ ein. Im November 1963 begann die USAF mit der Umsetzung des AMU Konzepts für das Gemini Programm (bei einem frühen AMU Entwurf hatte man auf den Brustpack verzichtet, was sich aber für das Gemini Raumschiff als nicht praktikabel erwies). LTV erhielt den Entwicklungsauftrag, wobei das Rocket Propulsion Laboratory in Kalifornien für den Wasserstoff-Peroxid Antrieb verantwortlich zeichnete. Die McDonnell Aircraft Corporation war für die Integration der AMU in die Servicesektion des Gemini Raumschiffs verantwortlich, die David Clark Company mußte ihre Raumanzüge anpassen. Das für Außenbordeinsätze vorgesehene Modell G4 C, ohnehin schon mit zusätzlichen Schichten (Nylon, aluminisiertes Mylar, Dacron und Nomex) verstärkt, erhielt insbesondere im Beinbereich einen zusätzlichen Schutz vor den heißen Triebwerks-Abgasen. Für die damalige Zeit war die AMU ein außerordentlich anspruchsvolles System. Die Lebenserhaltungssysteme waren für zunächst ein bis zwei Stunden Aufenthalt im Weltraum ausgelegt, eine Ausweitung auf drei Stunden konkret geplant. Komplexe Steuerungssysteme sollten auch Operationen in großem Abstand zum Raumschiff erlauben, wobei anfangs eine 60 m Sicherungsleine den Aktionsradius beschränken würde. Alles in allem war die AMU ein Miniaturraumschiff, jedoch ohne eine schützende Außenhülle.
Raumschiffs und zurück zu bewältigen. Die USAF, die nach der Einstellung des „Dyna-Soar“ Programms ihr Interesse einer eigenen Raumstation MOL (Manned Orbiting Laboratory) mit Gemini Versorgungsraumschiff zugewandt hatte, wollte das NASA Gemini Programm u.a. nutzen, die weiter entwickelte Astronaut Maneuvering Unit (AMU) zu erproben. Dagegen ließ die NASA die (HHMU) entwickeln. Wie der Name schon sagte, war letzteres ein eher simples, in der Hand zu haltendes, System. Sein Design brachte ihm auch den Spitznamen „Gun“ ein. Im November 1963 begann die USAF mit der Umsetzung des AMU Konzepts für das Gemini Programm (bei einem frühen AMU Entwurf hatte man auf den Brustpack verzichtet, was sich aber für das Gemini Raumschiff als nicht praktikabel erwies). LTV erhielt den Entwicklungsauftrag, wobei das Rocket Propulsion Laboratory in Kalifornien für den Wasserstoff-Peroxid Antrieb verantwortlich zeichnete. Die McDonnell Aircraft Corporation war für die Integration der AMU in die Servicesektion des Gemini Raumschiffs verantwortlich, die David Clark Company mußte ihre Raumanzüge anpassen. Das für Außenbordeinsätze vorgesehene Modell G4 C, ohnehin schon mit zusätzlichen Schichten (Nylon, aluminisiertes Mylar, Dacron und Nomex) verstärkt, erhielt insbesondere im Beinbereich einen zusätzlichen Schutz vor den heißen Triebwerks-Abgasen. Für die damalige Zeit war die AMU ein außerordentlich anspruchsvolles System. Die Lebenserhaltungssysteme waren für zunächst ein bis zwei Stunden Aufenthalt im Weltraum ausgelegt, eine Ausweitung auf drei Stunden konkret geplant. Komplexe Steuerungssysteme sollten auch Operationen in großem Abstand zum Raumschiff erlauben, wobei anfangs eine 60 m Sicherungsleine den Aktionsradius beschränken würde. Alles in allem war die AMU ein Miniaturraumschiff, jedoch ohne eine schützende Außenhülle.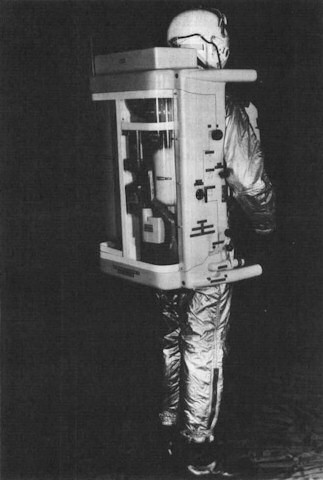{kind=link}
 Tatsächlich entwickelten sich die ersten Außenbordmanöver zu einem zentralen Punkt des Gemini Programms. Erste Erfahrungen der Astronauten zeigten, daß ein „Arbeiten“ im Weltraum prinzipiell möglich war. Aber auch, welche Bedeutung das Training am Boden hatte und wie wichtig Handgriffe, Fußtritte und das Sicherungsseil waren. Nach einem ersten Test bei Gemini IV bewies die HHMU bei Gemini X ihren Nutzen, als Michael Collins auf dem Rückweg vom angedockten Agena-Zielsatelliten den Halt verlor, sich aber mit der HHMU umgehend wieder stabilisieren konnte. Die erste Gelegenheit zur Erprobung der AMU kam mit Gemini IXA im Juni 1966. Eugene Cernan mußte jedoch feststellen, daß das Anlegen der AMU unter Weltraumbedingungen weitaus schwieriger war, als am Boden oder bei kurzen Parabelflügen. Als problematisch erwies es sich vor allem, in der Schwerelosigkeit die Position zu halten, um die AMU anzulegen. Die Positionen der Handgriffe und Fußtritte waren hierfür nicht optimal. Angesichts der großen körperlichen Anstrengungen waren die Kapazitäten des Extravehicular Life-Support System im Brustpack des Raumanzugs bald überschritten, worauf das Helmvisier von innen beschlug. An diesem Punkt brach das Kontrollzentrum das Experiment ab. Ein neuer Versuch sollte bei Gemini XII unternommen werden. Doch noch vor dem Start wurde das Experiment gestrichen. Andere Elemente des EVA Programms hatten höhere Priorität. Das Department of Defense Experiment D-12 erlebte damit nie einen praktischen Einsatz.
Tatsächlich entwickelten sich die ersten Außenbordmanöver zu einem zentralen Punkt des Gemini Programms. Erste Erfahrungen der Astronauten zeigten, daß ein „Arbeiten“ im Weltraum prinzipiell möglich war. Aber auch, welche Bedeutung das Training am Boden hatte und wie wichtig Handgriffe, Fußtritte und das Sicherungsseil waren. Nach einem ersten Test bei Gemini IV bewies die HHMU bei Gemini X ihren Nutzen, als Michael Collins auf dem Rückweg vom angedockten Agena-Zielsatelliten den Halt verlor, sich aber mit der HHMU umgehend wieder stabilisieren konnte. Die erste Gelegenheit zur Erprobung der AMU kam mit Gemini IXA im Juni 1966. Eugene Cernan mußte jedoch feststellen, daß das Anlegen der AMU unter Weltraumbedingungen weitaus schwieriger war, als am Boden oder bei kurzen Parabelflügen. Als problematisch erwies es sich vor allem, in der Schwerelosigkeit die Position zu halten, um die AMU anzulegen. Die Positionen der Handgriffe und Fußtritte waren hierfür nicht optimal. Angesichts der großen körperlichen Anstrengungen waren die Kapazitäten des Extravehicular Life-Support System im Brustpack des Raumanzugs bald überschritten, worauf das Helmvisier von innen beschlug. An diesem Punkt brach das Kontrollzentrum das Experiment ab. Ein neuer Versuch sollte bei Gemini XII unternommen werden. Doch noch vor dem Start wurde das Experiment gestrichen. Andere Elemente des EVA Programms hatten höhere Priorität. Das Department of Defense Experiment D-12 erlebte damit nie einen praktischen Einsatz.") 1966, kurz vor Ende des Gemini Programms, beauftragte die NASA die Rocket Research Corporationmit der Entwicklung einer weiter verbesserten HHMU. Statt mit Druckgas sollte diese nun, wie auch die AMU, mit Hydrazin betrieben werden. Auch die USAF ließ ihr System verbessern und von LTV und Bell Systeme entwickeln, die auch unbemannt/ferngesteuert operieren konnten. LTV entwarf die auf dem Rücken zu tragende Remote Maneuvering Unit (RMU), Bell stellte die auf der Brust zu tragende Dual-Purpose Maneuvering Unit (DMU) vor. Obwohl die NASA den Einsatz von Maneuvering Units im Apollo Programm bzw. im Apollo Applications Program (AAP) untersuchte, wurden hierzu keine nennenswerten praktischen Schritte unternommen. Die USAF hatte sich mittlerweile ganz von ihren Träumen für ein bemanntes Raumfahrtprogramm verabschieden müssen. Dennoch erweckte das Konzept einer Maneuvering Unit für den bemannten wie unbemannten Einsatz weiter großes Interesse bei Ingenieuren und Astronauten. Über die Jahre entstanden daher immer wieder neue Studien und Entwürfe. Neue Möglichkeiten eröffneten sich mit der Raumstation Skylab, ursprünglich selbst Bestandteil des AAP. Gleich mehrere verschiedene Maneuvering Units wurden zur Erprobung an Bord der Raumstation gebaut. Selbst das sehr umstrittene Konzept einer Foot-Controlled Maneuvering Unit (FCMU) wurde realisiert. Skylab Experiment T020 ging auf Ideen von John D. Bird zurück, der seit 1965 an „Jet Shoes“ forschte, bei denen Mikrotriebwerke an den Sohlen der Weltraumstiefel angebracht werden sollten. Steuern ließen sie sich durch Mikroschalter unter den Zehen, was den Vorteil hatte, daß die Hände frei blieben. Für das Skylab Experiment wurde das Konzept soweit modifiziert, daß der Astronaut auf einer Art Fahrradrahmen mit Sattel Platz nehmen
1966, kurz vor Ende des Gemini Programms, beauftragte die NASA die Rocket Research Corporationmit der Entwicklung einer weiter verbesserten HHMU. Statt mit Druckgas sollte diese nun, wie auch die AMU, mit Hydrazin betrieben werden. Auch die USAF ließ ihr System verbessern und von LTV und Bell Systeme entwickeln, die auch unbemannt/ferngesteuert operieren konnten. LTV entwarf die auf dem Rücken zu tragende Remote Maneuvering Unit (RMU), Bell stellte die auf der Brust zu tragende Dual-Purpose Maneuvering Unit (DMU) vor. Obwohl die NASA den Einsatz von Maneuvering Units im Apollo Programm bzw. im Apollo Applications Program (AAP) untersuchte, wurden hierzu keine nennenswerten praktischen Schritte unternommen. Die USAF hatte sich mittlerweile ganz von ihren Träumen für ein bemanntes Raumfahrtprogramm verabschieden müssen. Dennoch erweckte das Konzept einer Maneuvering Unit für den bemannten wie unbemannten Einsatz weiter großes Interesse bei Ingenieuren und Astronauten. Über die Jahre entstanden daher immer wieder neue Studien und Entwürfe. Neue Möglichkeiten eröffneten sich mit der Raumstation Skylab, ursprünglich selbst Bestandteil des AAP. Gleich mehrere verschiedene Maneuvering Units wurden zur Erprobung an Bord der Raumstation gebaut. Selbst das sehr umstrittene Konzept einer Foot-Controlled Maneuvering Unit (FCMU) wurde realisiert. Skylab Experiment T020 ging auf Ideen von John D. Bird zurück, der seit 1965 an „Jet Shoes“ forschte, bei denen Mikrotriebwerke an den Sohlen der Weltraumstiefel angebracht werden sollten. Steuern ließen sie sich durch Mikroschalter unter den Zehen, was den Vorteil hatte, daß die Hände frei blieben. Für das Skylab Experiment wurde das Konzept soweit modifiziert, daß der Astronaut auf einer Art Fahrradrahmen mit Sattel Platz nehmen {kind=link}
 mußte. Stickstoff-Druckgas aus einem Tank auf dem Rücken des Astronauten speiste die jeweils vier 4,5 N Düsen unter den Füßen. Tatsächlich konnte die Steuerungsfähigkeit der FCMU um alle drei Achsen erfolgreich bei Tests im Inneren des Skylab OWS (Orbital Workshop) demonstriert werden. „Klassischer“ war das Design der Automatically Stabilized Maneuvering Unit (ASMU). Martin Marietta hatte diesen Nachfahren der AMU im Auftrag der NASA gebaut. Als drittes Modell wurde eine verbesserte Hand-Held Maneuvering Unit getestet. Auch diese beiden Systeme bewährten sich. Als Favorit der fünf Astronauten, die sie bei drei Missionen flogen, stellte sich die ASMU heraus. An dessen Entwicklung zeigte nicht nur die NASA sondern auch das Militär Interesse. Daher ko-finanzierte die Space and Missile Systems Organization (SAMSO) das Projekt. Alle drei im Skylab Programm erprobten Systeme waren jedoch nicht für den Einsatz außerhalb der Station konstruiert. Und nach dem Ende des Skylab Programms sowie einem letzten Apollo Flug im Jahr 1975 lag das bemannte Raumfahrtprogramm der NASA ohnehin auf Eis, bis 1981 endlich die „Columbia“ zum Jungfernflug des Space Shuttle starten konnte. Somit blieb es für die nächsten Jahre bei der Weiterentwicklung der ASMU und ihrer Erprobung z.B. in der Weightless Environment Training Facility (WETF) in Houston. Insbesondere der im April 1966 ins Astronautenteam aufgenommene Bruce McCandless arbeitete unermüdlich an der Verbesserung des Systems. Obwohl er als Backup-Pilot für die erste bemannte Skylab Mission berufen wurde, erhielt er keine Gelegenheit, das von ihm mit entwickelte Experiment M-509 , die ASMU, praktisch im Weltraum zu erproben. McCandless arbeitete stattdessen unter NASA Programm-Chef Charles Whitsett ein weiteres Jahrzehnt an der Verbesserung des ASMU Entwurfs zur EMU/MMU. Vor allem die inzwischen verfügbaren Computersysteme erweiterten die Möglichkeiten der MMU deutlich, während das Antriebs– und Kontrollkonzept unverändert blieb: 24 Stickstoff-Düsen gesteuert über zwei in Hüfthöhe ausklappbare Ausleger mit den Bedienelementen. Erstmals wurde aber der Extravehicular Mobility Unit genannte neue Raumanzug für Außenbordeinsätze perfekt auf das Zusammenspiel mit der MMU abgestimmt. Im Gemini Programm hatte man die AMU nur notdürftig an den G4 C Raumanzug anpassen können. Vor allem die vorgegebene gekrümmte Rückenhaltung hatte sich damals als störend erwiesen. Im Space Shuttle Programm, das u.a. Reparatureinsätze an Satelliten wie auch Konstruktionsarbeiten im All vorsah, sollte nun endlich die große Stunde der inzwischen Manned Maneuvering Unit genannten Konstruktion kommen. Ende der 1970er/Anfang der 1980er Jahre lief bei Martin Marietta und NASA ein umfangreiches Erprobungsprogramm für das System, dem man eine zentrale Rolle im Space Shuttle Programm zusprach. Erst in Kombination mit der Manned Maneuvering Unit (MMU), wie das System seit den 1980er Jahren hieß, und dem Remote Manipulator System (RMS) konnte das Space Shuttle tatsächlich seine wahre Leistungsfähigkeit unter
mußte. Stickstoff-Druckgas aus einem Tank auf dem Rücken des Astronauten speiste die jeweils vier 4,5 N Düsen unter den Füßen. Tatsächlich konnte die Steuerungsfähigkeit der FCMU um alle drei Achsen erfolgreich bei Tests im Inneren des Skylab OWS (Orbital Workshop) demonstriert werden. „Klassischer“ war das Design der Automatically Stabilized Maneuvering Unit (ASMU). Martin Marietta hatte diesen Nachfahren der AMU im Auftrag der NASA gebaut. Als drittes Modell wurde eine verbesserte Hand-Held Maneuvering Unit getestet. Auch diese beiden Systeme bewährten sich. Als Favorit der fünf Astronauten, die sie bei drei Missionen flogen, stellte sich die ASMU heraus. An dessen Entwicklung zeigte nicht nur die NASA sondern auch das Militär Interesse. Daher ko-finanzierte die Space and Missile Systems Organization (SAMSO) das Projekt. Alle drei im Skylab Programm erprobten Systeme waren jedoch nicht für den Einsatz außerhalb der Station konstruiert. Und nach dem Ende des Skylab Programms sowie einem letzten Apollo Flug im Jahr 1975 lag das bemannte Raumfahrtprogramm der NASA ohnehin auf Eis, bis 1981 endlich die „Columbia“ zum Jungfernflug des Space Shuttle starten konnte. Somit blieb es für die nächsten Jahre bei der Weiterentwicklung der ASMU und ihrer Erprobung z.B. in der Weightless Environment Training Facility (WETF) in Houston. Insbesondere der im April 1966 ins Astronautenteam aufgenommene Bruce McCandless arbeitete unermüdlich an der Verbesserung des Systems. Obwohl er als Backup-Pilot für die erste bemannte Skylab Mission berufen wurde, erhielt er keine Gelegenheit, das von ihm mit entwickelte Experiment M-509 , die ASMU, praktisch im Weltraum zu erproben. McCandless arbeitete stattdessen unter NASA Programm-Chef Charles Whitsett ein weiteres Jahrzehnt an der Verbesserung des ASMU Entwurfs zur EMU/MMU. Vor allem die inzwischen verfügbaren Computersysteme erweiterten die Möglichkeiten der MMU deutlich, während das Antriebs– und Kontrollkonzept unverändert blieb: 24 Stickstoff-Düsen gesteuert über zwei in Hüfthöhe ausklappbare Ausleger mit den Bedienelementen. Erstmals wurde aber der Extravehicular Mobility Unit genannte neue Raumanzug für Außenbordeinsätze perfekt auf das Zusammenspiel mit der MMU abgestimmt. Im Gemini Programm hatte man die AMU nur notdürftig an den G4 C Raumanzug anpassen können. Vor allem die vorgegebene gekrümmte Rückenhaltung hatte sich damals als störend erwiesen. Im Space Shuttle Programm, das u.a. Reparatureinsätze an Satelliten wie auch Konstruktionsarbeiten im All vorsah, sollte nun endlich die große Stunde der inzwischen Manned Maneuvering Unit genannten Konstruktion kommen. Ende der 1970er/Anfang der 1980er Jahre lief bei Martin Marietta und NASA ein umfangreiches Erprobungsprogramm für das System, dem man eine zentrale Rolle im Space Shuttle Programm zusprach. Erst in Kombination mit der Manned Maneuvering Unit (MMU), wie das System seit den 1980er Jahren hieß, und dem Remote Manipulator System (RMS) konnte das Space Shuttle tatsächlich seine wahre Leistungsfähigkeit unter  Beweis stellen. Anfangs plante man sogar, die MMU praktisch bei jeder Shuttle Mission in der Nutzlastbucht mitzuführen. Sollten beim Start Kacheln des Hitzeschutzschildes verloren gehen, waren die Astronauten trainiert, mit Hilfe der MMU Reparaturen vorzunehmen. Eine erste große Bewährungsprobe des Systems sollte aber die Reparatur des SMM Satelliten werden. Hier wollte die NASA die volle Leistungsfähigkeit und Vielseitigkeit des Space Shuttle demonstrieren. Transport eines großen Forschungssatelliten (LDEF), Aussetzen desselben mit dem RMS; Anfliegen des defekten SMM mit der MMU sowie Bergung und Reparatur durch die Astronauten. Doch zuvor mußten die Fähigkeiten der MMU bei einer ersten Demonstrationsmission noch praktisch verifiziert werden. Und mit dieser Mission STS 41 B schlug im Februar 1984 nach fast 18 Jahren im Astronautenkorps endlich die Stunde für Bruce McCandless. 1983 vor die Wahl gestellt, entweder weiter auf seinen ersten Einsatz als Shuttle Pilot zu warten, oder 1984 als Missionsspezialist die erste Erprobung der MMU im All zu leiten, fiel ihm die Entscheidung nicht schwer. Mit Sicherheit der besttrainierte Astronaut der NASA für diese Mission erhielt nun endlich die Gelegenheit „seine“ MMU selbst zu fliegen. Sein Wissen um die Möglichkeiten der MMU hatte er im Training schon an seine Kollegen weitergegeben, die für die nächsten Einsätze ausgewählt worden waren. Der Auftakt der zehnten Shuttle Mission war jedoch zunächst eher enttäuschend. Zwei Kommunikationssatelliten wurden ausgesetzt — und strandeten nach Defekten ihrer Kickstufen auf viel zu erdnahen Bahnen. Und das waren nur die prominentesten Ausfälle von zahlreichen weiteren während der Mission. Doch die beiden EVAs unter Einsatz der MMU wurden zu einem glänzenden Erfolg. Das erste Außenbordmanöver begann am 07.02.1984 um 12:10 UTC. Bruce McCandless steuerte seine MMU aus der Nutzlastbucht der „Challenger“ bis auf etwa 90 m Entfernung, wobei er die Steuerung um alle drei Achsen testete und sich sehr zufrieden über das Flugverhalten äußerte. Erstmals unternahm an diesem Tag ein Astronaut einen Weltraumausstieg ohne Sicherungsseil! Entsprechend groß war die Anspannung an Bord des Shuttle.
Beweis stellen. Anfangs plante man sogar, die MMU praktisch bei jeder Shuttle Mission in der Nutzlastbucht mitzuführen. Sollten beim Start Kacheln des Hitzeschutzschildes verloren gehen, waren die Astronauten trainiert, mit Hilfe der MMU Reparaturen vorzunehmen. Eine erste große Bewährungsprobe des Systems sollte aber die Reparatur des SMM Satelliten werden. Hier wollte die NASA die volle Leistungsfähigkeit und Vielseitigkeit des Space Shuttle demonstrieren. Transport eines großen Forschungssatelliten (LDEF), Aussetzen desselben mit dem RMS; Anfliegen des defekten SMM mit der MMU sowie Bergung und Reparatur durch die Astronauten. Doch zuvor mußten die Fähigkeiten der MMU bei einer ersten Demonstrationsmission noch praktisch verifiziert werden. Und mit dieser Mission STS 41 B schlug im Februar 1984 nach fast 18 Jahren im Astronautenkorps endlich die Stunde für Bruce McCandless. 1983 vor die Wahl gestellt, entweder weiter auf seinen ersten Einsatz als Shuttle Pilot zu warten, oder 1984 als Missionsspezialist die erste Erprobung der MMU im All zu leiten, fiel ihm die Entscheidung nicht schwer. Mit Sicherheit der besttrainierte Astronaut der NASA für diese Mission erhielt nun endlich die Gelegenheit „seine“ MMU selbst zu fliegen. Sein Wissen um die Möglichkeiten der MMU hatte er im Training schon an seine Kollegen weitergegeben, die für die nächsten Einsätze ausgewählt worden waren. Der Auftakt der zehnten Shuttle Mission war jedoch zunächst eher enttäuschend. Zwei Kommunikationssatelliten wurden ausgesetzt — und strandeten nach Defekten ihrer Kickstufen auf viel zu erdnahen Bahnen. Und das waren nur die prominentesten Ausfälle von zahlreichen weiteren während der Mission. Doch die beiden EVAs unter Einsatz der MMU wurden zu einem glänzenden Erfolg. Das erste Außenbordmanöver begann am 07.02.1984 um 12:10 UTC. Bruce McCandless steuerte seine MMU aus der Nutzlastbucht der „Challenger“ bis auf etwa 90 m Entfernung, wobei er die Steuerung um alle drei Achsen testete und sich sehr zufrieden über das Flugverhalten äußerte. Erstmals unternahm an diesem Tag ein Astronaut einen Weltraumausstieg ohne Sicherungsseil! Entsprechend groß war die Anspannung an Bord des Shuttle.  Standen Kommandant und Pilot doch bereit, sofort ein Rettungsmanöver mit dem Orbiter zu fliegen, sollte die MMU außer Kontrolle geraten. Unterdessen hielt sich Robert Stewart in der Nutzlastbucht mit der zweiten MMU bereit. Als McCandless zum Shuttle zurückkehrte, war es an ihm, die MMU ausgiebig weiter zu testen. McCandless fixierte sich unterdessen in den Manipulator Foot Restraint (MFR) Fußhalterungen des RMS und wurde nun mit dem Manipulatorarm aus der Nutzlastbucht gehoben. Auch das war eine Vorbereitung auf die SMM Reparaturmission. Nach 5:55 h war die EVA mit nur minimalen technischen Problemen beendet. Bereits am 08.02.1984 um 10:24 UTC begann die nächste. Diesmal stand die simulierte Reparatur eines Satelliten unter Einsatz der MMU im Vordergrund. So wurde das Trunnion Pin Attachment Device (TPAD) getestet, ein am Satelliten anzubringender Fixpunkt, den der RMS greifen konnte. Ein Pin am in der Nutzlastbucht des Shuttle verankerten SPAS-01 Palettensatelliten war diesmal der Montagepunkt des TPAD. Nach 6:17 h war auch die zweite EVA abgeschlossen und bestätigte den guten Eindruck der ersten. Angesichts des PR-Desasters, daß die Mission ansonsten für die NASA gewesen war (zwei Kommunikationssatelliten ausgesetzt und „verloren“, ein Ballonsatellit ausgesetzt und geplatzt, ein deutscher Forschungssatellit wegen Problemen mit dem RMS gar nicht erst ausgesetzt und dazu vielfältige Ausfälle wichtiger Bordsysteme), war die MMU Erprobung immerhin ein Lichtblick. Und tatsächlich bewährte sie sich zwei Monate später bei der Reparatur von „Solar Max“ erneut. Allerdings mißlang das Anbringen des TPAD an SMM und beim Versuch, dessen Rotation unter Einsatz der MMU Steuerdüsen zu stoppen, wurde der Satellit in eine unkontrollierbare Rotation versetzt. Rundum erfolgreich war
Standen Kommandant und Pilot doch bereit, sofort ein Rettungsmanöver mit dem Orbiter zu fliegen, sollte die MMU außer Kontrolle geraten. Unterdessen hielt sich Robert Stewart in der Nutzlastbucht mit der zweiten MMU bereit. Als McCandless zum Shuttle zurückkehrte, war es an ihm, die MMU ausgiebig weiter zu testen. McCandless fixierte sich unterdessen in den Manipulator Foot Restraint (MFR) Fußhalterungen des RMS und wurde nun mit dem Manipulatorarm aus der Nutzlastbucht gehoben. Auch das war eine Vorbereitung auf die SMM Reparaturmission. Nach 5:55 h war die EVA mit nur minimalen technischen Problemen beendet. Bereits am 08.02.1984 um 10:24 UTC begann die nächste. Diesmal stand die simulierte Reparatur eines Satelliten unter Einsatz der MMU im Vordergrund. So wurde das Trunnion Pin Attachment Device (TPAD) getestet, ein am Satelliten anzubringender Fixpunkt, den der RMS greifen konnte. Ein Pin am in der Nutzlastbucht des Shuttle verankerten SPAS-01 Palettensatelliten war diesmal der Montagepunkt des TPAD. Nach 6:17 h war auch die zweite EVA abgeschlossen und bestätigte den guten Eindruck der ersten. Angesichts des PR-Desasters, daß die Mission ansonsten für die NASA gewesen war (zwei Kommunikationssatelliten ausgesetzt und „verloren“, ein Ballonsatellit ausgesetzt und geplatzt, ein deutscher Forschungssatellit wegen Problemen mit dem RMS gar nicht erst ausgesetzt und dazu vielfältige Ausfälle wichtiger Bordsysteme), war die MMU Erprobung immerhin ein Lichtblick. Und tatsächlich bewährte sie sich zwei Monate später bei der Reparatur von „Solar Max“ erneut. Allerdings mißlang das Anbringen des TPAD an SMM und beim Versuch, dessen Rotation unter Einsatz der MMU Steuerdüsen zu stoppen, wurde der Satellit in eine unkontrollierbare Rotation versetzt. Rundum erfolgreich war  dagegen der dritte Einsatz der MMU im November 1984. Bei der Bergung der beiden im Februar auf ihren Aussetzorbits „gestrandeten“ Kommunikationssatelliten Westar VI und Palapa B-2 bewährte sich das Zusammenwirken von MMU und RMS ausgezeichnet. Dennoch sollte der dritte Einsatz zugleich der letzte für die MMU sein. Nach der „Challenger-Katastrophe“ 1986 erschien der weitere Einsatz des komplexen und wartungsintensiven Systems Kritikern als zu riskant. Zudem entfiel der Bedarf, da die Starts kommerzieller Nutzlasten und Reparaturmissionen (mit Ausnahme jener zum Hubble Space Telescope) gestrichen worden waren. Für die verbliebenen Außenbordaktivitäten reichten die Möglichkeiten des EMU Raumanzugs vollkommen aus. Zumal dieser für das ISS Programm in den 1990er Jahren nochmals verbessert wurde. Tot war die MMU Technologie damit allerdings noch nicht. Während die beiden flugfähigen MMU Exemplare noch viele Jahre von der NASA so eingelagert wurden, daß sie eventuell hätten wieder flugfähig gemacht werden können, begann man unter dem Namen Simplified Aid for EVA Rescue mit der Entwicklung eines portablen Rettungssystems. Das wesentlich kleinere und leichtere Rucksacksystem konnte von Astronauten auch bei einer EVA unter beengten Bedingungen getragen werden. Sein Stickstoff-Druckgasvorrat von lediglich 1,4 kg erlaubte keine großen Manöver. Doch SAFER war ja auch ausschließlich dazu bestimmt, einen Astronauten, der ohne Sicherungsleine von seinem Raumschiff weggedriftet war, die sichere Rückkehr zu erlauben. Das System wurde bei zwei Space Shuttle Missionen erfolgreich erprobt und kam später bei diversen Außenbordmanövern zum Einsatz.
dagegen der dritte Einsatz der MMU im November 1984. Bei der Bergung der beiden im Februar auf ihren Aussetzorbits „gestrandeten“ Kommunikationssatelliten Westar VI und Palapa B-2 bewährte sich das Zusammenwirken von MMU und RMS ausgezeichnet. Dennoch sollte der dritte Einsatz zugleich der letzte für die MMU sein. Nach der „Challenger-Katastrophe“ 1986 erschien der weitere Einsatz des komplexen und wartungsintensiven Systems Kritikern als zu riskant. Zudem entfiel der Bedarf, da die Starts kommerzieller Nutzlasten und Reparaturmissionen (mit Ausnahme jener zum Hubble Space Telescope) gestrichen worden waren. Für die verbliebenen Außenbordaktivitäten reichten die Möglichkeiten des EMU Raumanzugs vollkommen aus. Zumal dieser für das ISS Programm in den 1990er Jahren nochmals verbessert wurde. Tot war die MMU Technologie damit allerdings noch nicht. Während die beiden flugfähigen MMU Exemplare noch viele Jahre von der NASA so eingelagert wurden, daß sie eventuell hätten wieder flugfähig gemacht werden können, begann man unter dem Namen Simplified Aid for EVA Rescue mit der Entwicklung eines portablen Rettungssystems. Das wesentlich kleinere und leichtere Rucksacksystem konnte von Astronauten auch bei einer EVA unter beengten Bedingungen getragen werden. Sein Stickstoff-Druckgasvorrat von lediglich 1,4 kg erlaubte keine großen Manöver. Doch SAFER war ja auch ausschließlich dazu bestimmt, einen Astronauten, der ohne Sicherungsleine von seinem Raumschiff weggedriftet war, die sichere Rückkehr zu erlauben. Das System wurde bei zwei Space Shuttle Missionen erfolgreich erprobt und kam später bei diversen Außenbordmanövern zum Einsatz.